China Unleashes the Power of Jellyfish for Next-Gen Underwater Robots

Beneath the shimmering surface of the crystal-clear ocean, a mesmerizing sight unfolds. A jellyfish-like robot gracefully glides through the water, its translucent body undulating with an otherworldly elegance. As sunlight filters through the depths, the robot’s jelly-like muscle glistens, casting a soft, ethereal glow that illuminates its surroundings.
The robot moves effortlessly, propelled by its remarkable artificial muscle. With each contraction and expansion, the jelly-like structure pulses, resembling the rhythmic dance of its natural inspiration. This remarkable innovation could revolutionize the field of underwater robotics. Inspired by the unique properties of jellyfish, researchers from China’s Zhejiang University have designed a soft and watery muscle that can swiftly respond to electrical signals, provide controlled underwater propulsion, and even repair itself after mechanical damage.
Underwater robots have become invaluable tools for exploring the depths of the ocean and undertaking challenging tasks in extreme conditions. However, existing artificial muscles used in these robots often face limitations such as the need for tethered power systems, a lack of adaptability, and low actuation speed.
For instance, certain muscles used in underwater robots possess remarkable qualities, such as being soft, efficient, and adept at blending seamlessly with the water. However, they require complex systems to pump and control them, and their movement is limited to slow speeds. On the other hand, there are muscles that respond to heat, but they lack mobility and are challenging to experiment with outside of controlled laboratory settings. Additionally, there are muscles made from special materials that have limitations in terms of frequency and force.
Consequently, there is a strong demand for a versatile artificial muscle with softness, adaptability to water environments, and rapid movement capabilities, all powered by a portable system.
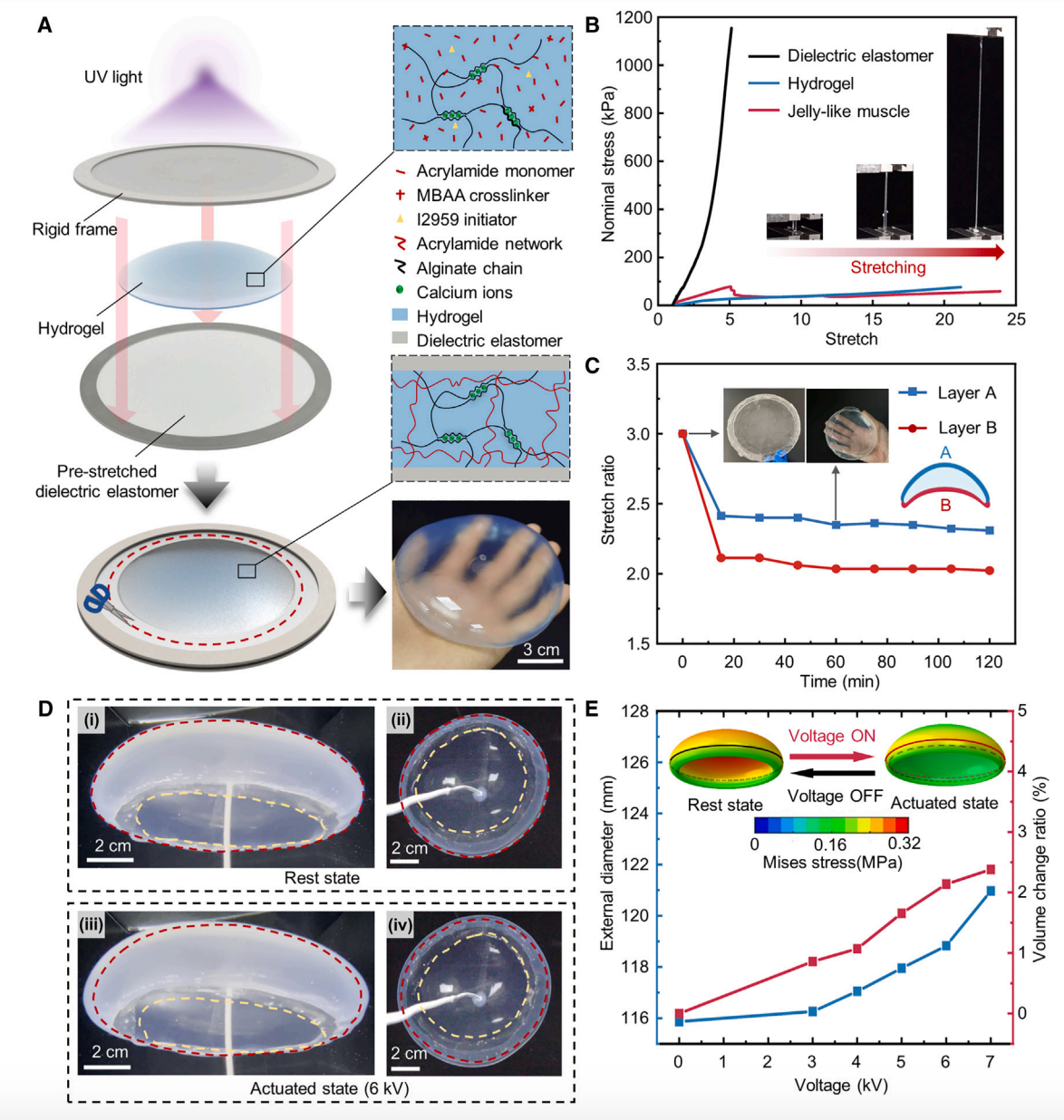
The scientists have been working with a material called dielectric elastomers, which exhibit quick responses to electrical signals underwater. However, practical applications of this material face certain challenges. It requires a rigid framework to convert its deformations into desired robotic movements, which restricts the robot’s design and functionality. Furthermore, the electrodes used in this material can hinder optical and acoustic performance, making it less compatible with the underwater environment. Another drawback is the material’s tendency to crack under mechanical or electrical stress, potentially shortening the lifespan of the robot system. Conversely, hydrogels possess soft and water-responsive properties, but they suffer from slow response times and performance instability due to excessive swelling.
To overcome these obstacles, the team turned to jellyfish for inspiration, taking note of their watery bodies and rapid contraction abilities. Jellyfish are fascinating creatures characterized by their high water content (exceeding 95%) and remarkable softness, with elastic moduli ranging from 10 to 100 kPa.
Emulating these properties, the team has developed artificial muscles using a water-based hydrogel with an impressive water content of 87.7%. After accounting for the weight of the included dielectric elastomers (DEs), the overall water content remains high at 83.3%. This water content surpasses that of the majority of existing underwater artificial muscles, while maintaining an elastic modulus of 66.9 kPa, similar to the softness exhibited by jellyfish. This innovative design not only enhances the muscles’ flexibility and adaptability but also significantly improves their transparency and camouflage capabilities in water environments.
Furthermore, they aim to develop a strong bonding mechanism between the materials to enable structural repairs, presenting innovative possibilities for underwater robot research and enhancing their exploration capabilities in the vast oceanic depths.
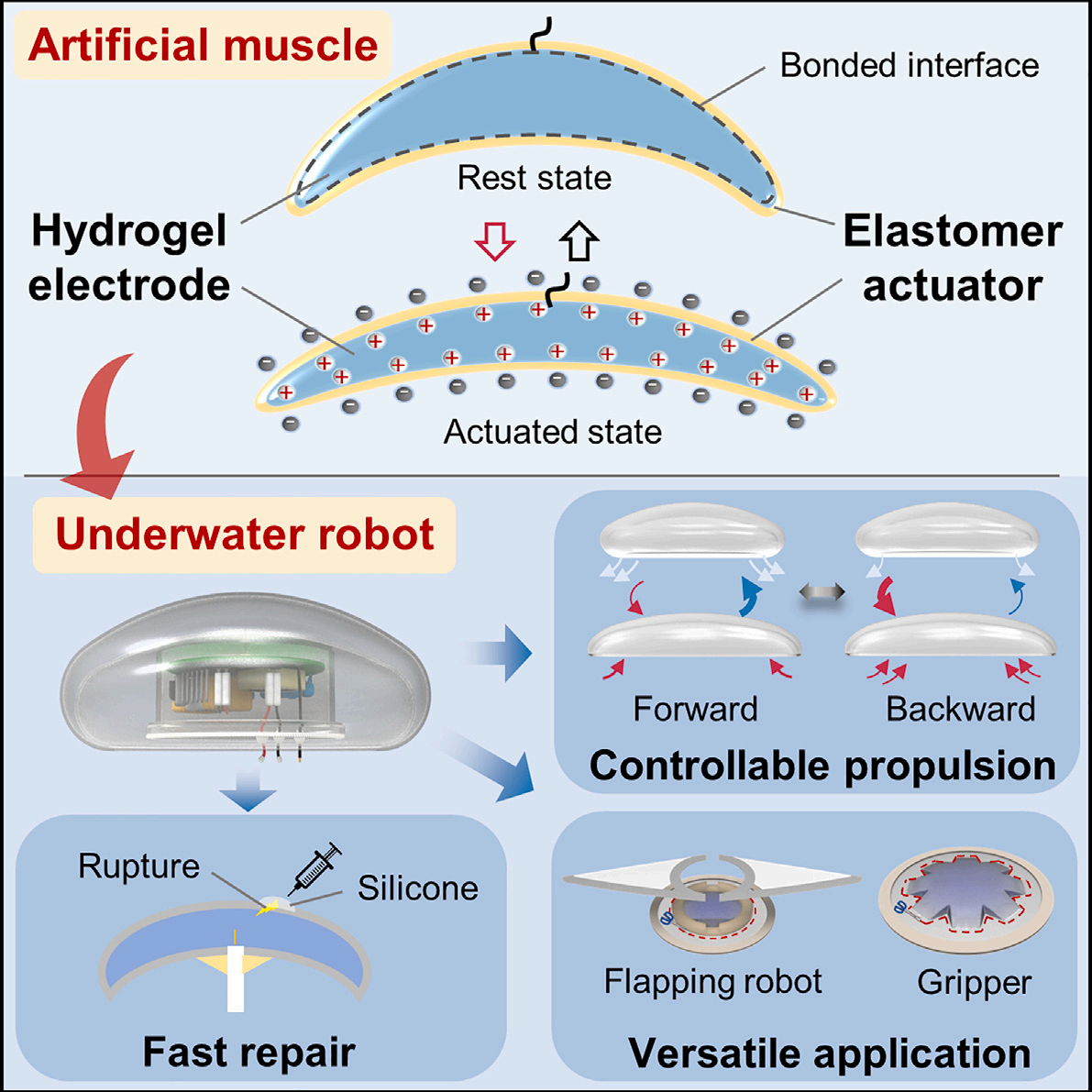
The jelly-like muscle instantly responds to electrical stimuli, allowing for precise underwater propulsion. By adjusting the voltage signal, the direction of propulsion can be easily controlled. Moreover, the muscle exhibits a remarkable ability to recover from electromechanical failures through self-repair.
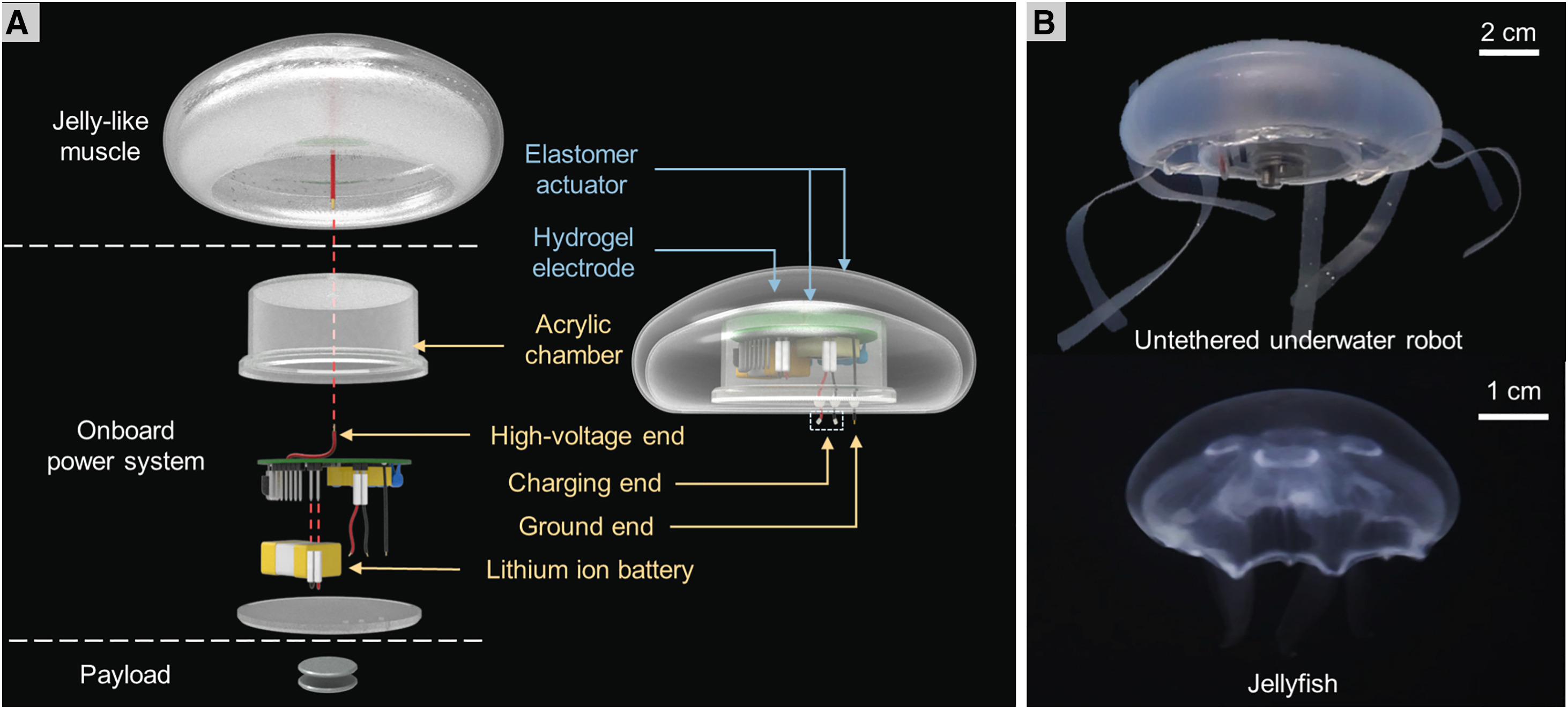
To demonstrate the practical applications of this innovation, the scientists assembled an untethered underwater robot by integrating the jelly-like muscle with an onboard power system. The robot achieved a maximum speed of 0.91 cm/s (equivalent to 0.3 body lengths per second) and displayed an impressive endurance of 15.7 minutes using a 500-mAh lithium-ion battery.
One of the most promising aspects of this technology is its versatility. By tailoring the jelly-like muscle, it is possible to create underwater robots with different forms and functionalities, opening up a wide range of potential applications.
The development of this jelly-like artificial muscle represents a significant step forward in the field of underwater robotics. Its softness, water adaptability, rapid actuation, and self-repair capabilities make it an ideal candidate for future underwater exploration and various other underwater applications.
The research findings have been published in the scientific journal Cell Reports Physical Science, and featured on the cover of its May 15 issue. The team believes that their work will inspire further advancements in the field.
As scientists continue to explore the mysteries of the ocean, this jelly-like artificial muscle could play a vital role in unlocking new possibilities for underwater robotics and expanding our understanding of the underwater world.
Editor: zhaozhizhao
https://www.sciencedirect.com/science/article/pii/S2666386424002170

